
I am currently a PhD student in MIT’s Department of Aeronautics and Astronautics working in the Aerospace Controls Lab with Professor Jonathan How. I got my SM degree from MIT in 2023 and my Bachelor’s degree in Mechanical Engineering from the University of Iowa in 2021.
My research seeks to improve safety in robotics applications by studying the intersection of deep learning and control theory. Specifically, I am exploring the use of reachability analysis for certification and synthesis of closed-loop systems that use learned components for perception and/or control. The goal of my work is to develop autonomous systems capable of operating safely in uncertain and dynamic environments, such as those shared with humans or other autonomous agents.
Prior to my arrival at MIT, I studied both geometric and adaptive control with Professor Venanzio Cichella in the University of Iowa’s Cooperative Autonomous Systems Lab. I also spent a summer working on applied robotics with Dr. Patrick Walters at the Naval Surface Warefare Center Panama City Division.
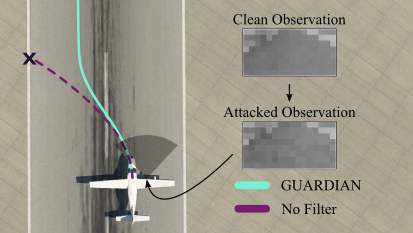
Safety Filtering against Adversarial Attacks
Refinement Algorithms for Safety Certification
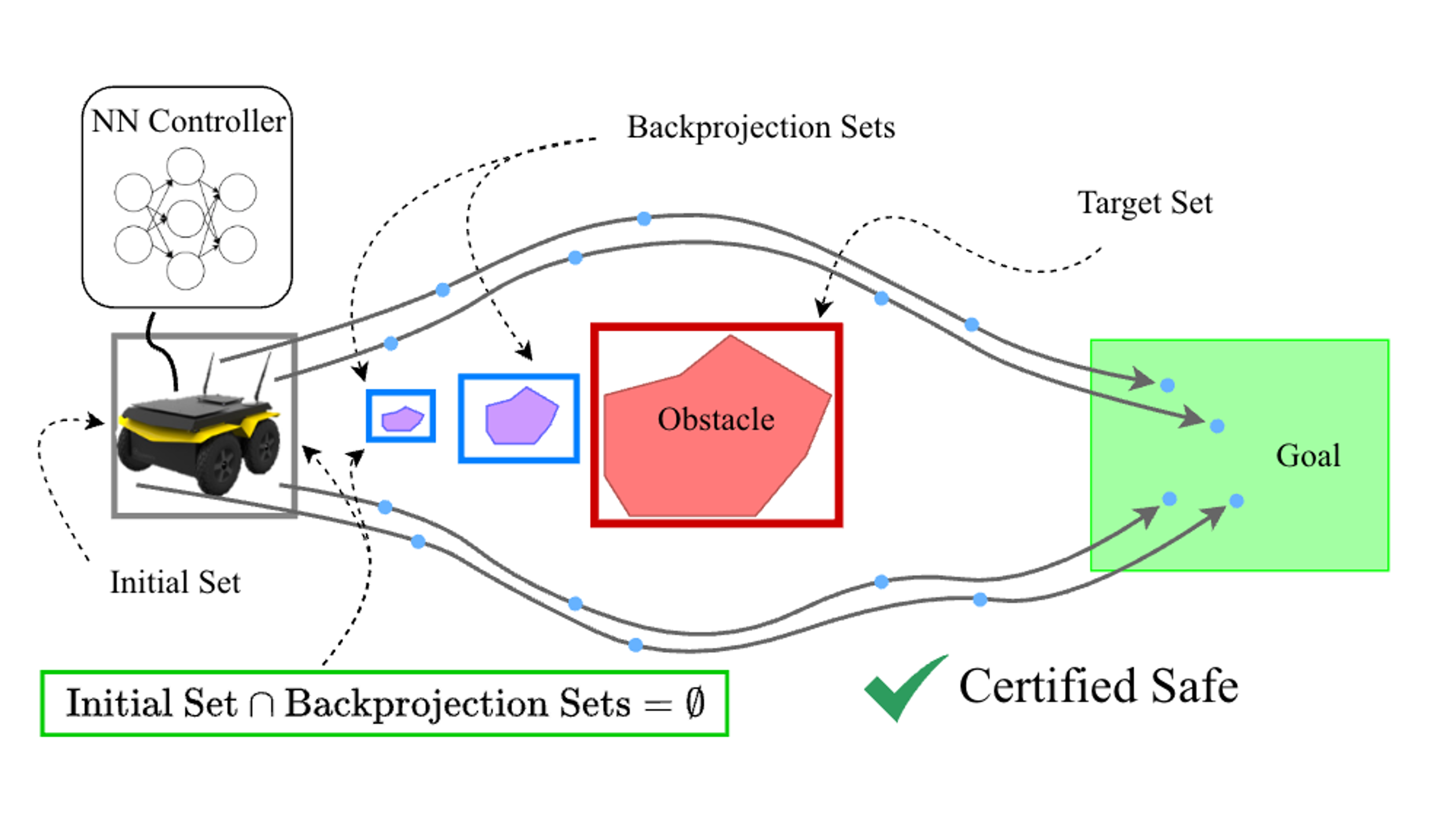
Backward Reachability for Neural Feedback Loops
Outside of research, I’m also a fellow in the AeroAstro Communications Lab. As a CommLab fellow, I help develop online resources and work with peers in one-on-one coaching sessions to help build technical communication skills within our department.
Recent News
- July 2026: I successfully defended my PhD thesis, entitled “Reachability-Based Safety Assurances for Neural Feedback Loops with Bounded Uncertainty”! Watch my defense here: Defense Video
- May 2026: Our work GUARDIAN: Safety Filtering for Systems with Perception Models Subject to Adversarial Attacks was published in L-CSS and will be presented at CDC in December.