
Pre-prints
 |
Peer-Reviewed Publications
 |
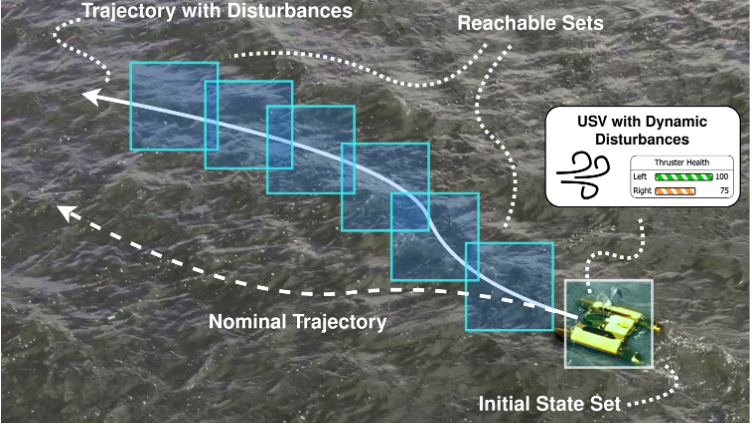 | Safe Autonomy for Uncrewed Surface Vehicles Using Adaptive Control and Reachability AnalysisKaran Mahesh, Tyler M. Paine, Max L. Greene, Nicholas Rober, Steven Lee, Sildomar T. Monteiro, Anuradha Annaswamy, Michael R. Benjamin, Jonathan P. HowTransactions on Control Systems Technology (TCST), 2025Paper Cite |
 |
 |
 |
 |
 |
 |
 |
Theses
 |